填空题:
- 传感器网络三大基本要素:传感器、感知对象、观测者
- 传感器节点的基本功能模块包括: 数据采集模块 、 数据处理和控制模块 、
通信模块 、供电模块四个,其中 通信模块 能量消耗最大。 - 传感器节点通信模块的工作模式有 发送 、 接收 、 空闲 和 睡眠 。
- 无线传感器网络拓扑控制主要通过 功率调节 和 睡眠调度机制 两种方式实现。
- 传感器网络中的平面路由协议主要有 洪泛路由 、 闲聊法 、SPIN 等。
- 传感器网络中的路由协议按照节点在路由过程中是否有层次结构、作用是否有差异,可分为
平面路由协议 和 层次路由协议 。 - K-连通 指至少去掉 k 个节点才能使网络不连通。
- 目标定位 是确定网络覆盖范围内其他目标节点的坐标位置。
- *无线传感器网络经典 MAC 协议是 S-MAC,它主要特征是
提供良好的扩展性、减少节点能量消耗 。 - 无线传感器网络根据覆盖目标不同,将覆盖算法分为 点覆盖 、 面覆盖 、
栅栏覆盖 三种类型。 - 传感器网络拓扑结构包括 平面网络结构 、 分级网络结构 、 混合网络结构
、Mesh 网络结构 四种。 - 洪泛 路由协议是无线传感器网络中最基本、最简单的平面路由协议。
- 传感器网络中的路由协议按照传输过程中采用的路径多少分为: 单路径路由协议
和 多路径路由协议 。
- 无线传感器网络中节点部署方式主要分为 确定性部署 、 随机性部署 、
混合式部署 三种。 - 实现传感器节点时间同步的同步消息包括 单向消息交换 、 双向消息交换 、
接收端-接收端同步 三种。 - 无线传感器网络时间同步协议 TPSN 实现包括 级别探索 和 同步 两个阶段。
- 节点覆盖感知模型主要有 布尔感知模型 和 概率感知模型 。
- 混合网络拓扑结构中包括基本的 平面 和 分级 两种网络结构。
- 典型的覆盖算法包括 最佳与最坏情况覆盖 、 圆周覆盖 、和连通传感器覆盖等。
- 按源节点获取路径的方法: 主动路由协议 、 按需路由协议 、 混合路由协议
。 - 按节点参与通信的方式: 直接通信路由协议 、 平面路由协议 、
层次路由协议 。 - 按路由的发现过程: 以位置信息为中心的路由协议 、 以数据为中心的路由协议
。 - 无线通信介质主要包括 无线电波 、 红外线 、 微波 、 卫星 。
- 列举三个与距离无关的定位方法 质心定位算法 、 凸规划定位算法 、APS
定位算法 。 - 无线传感器网络传输层协议主要实现 event-to-sink 和 sink-to-sensors
两种方式消息的传送。 - 根据信息的抽象程度,数据融合分为 数据级融合 、 特征级融合 、
决策级融合 。 - 传感器网络节能的主要策略有 休眠机制 、 数据融合机制 。
- 常用的短距离无线通信技术包括 蓝牙 、Zigbee、UWB、WIFI 等。
- *无线传感器网络接入 Internet 网络的方式有 以太网 、 无线局域网 、
移动通信网 、 有线电视网 等。
- 名词解释:(只要给出缩写的全名中文意思,不需要解释)
WSN:无线传感器网络
ISO:国际标准化组织
MAC:介质访问控制
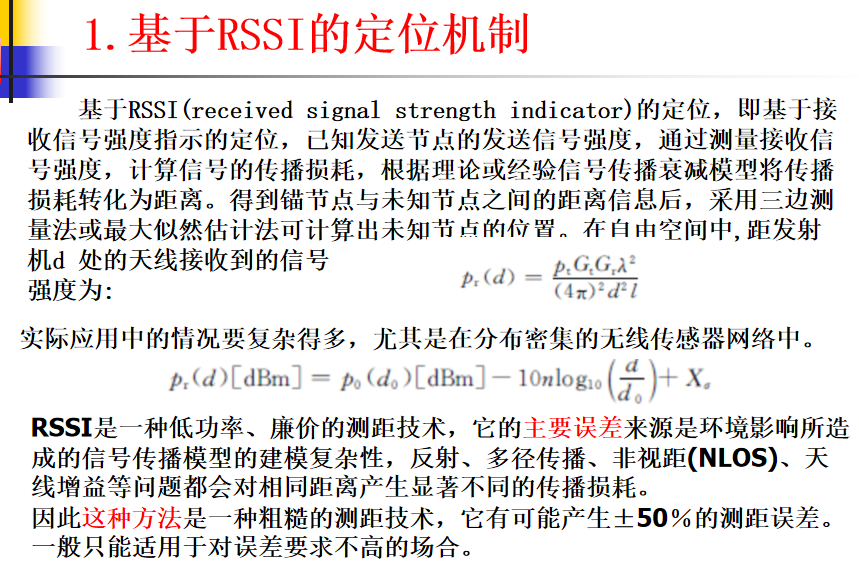
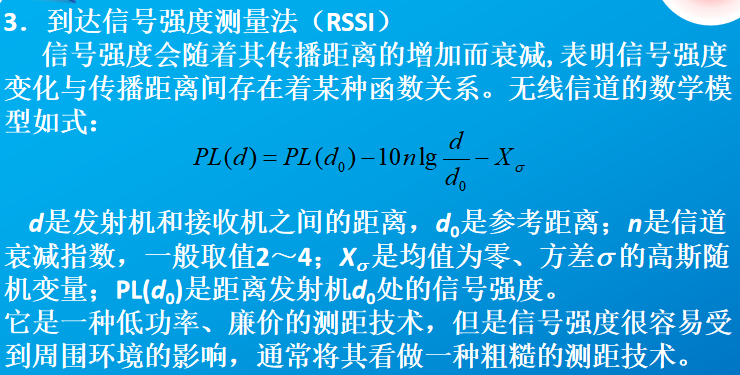
RSSI:接收信号强度指示
ToA:(基于)到达时间定位法
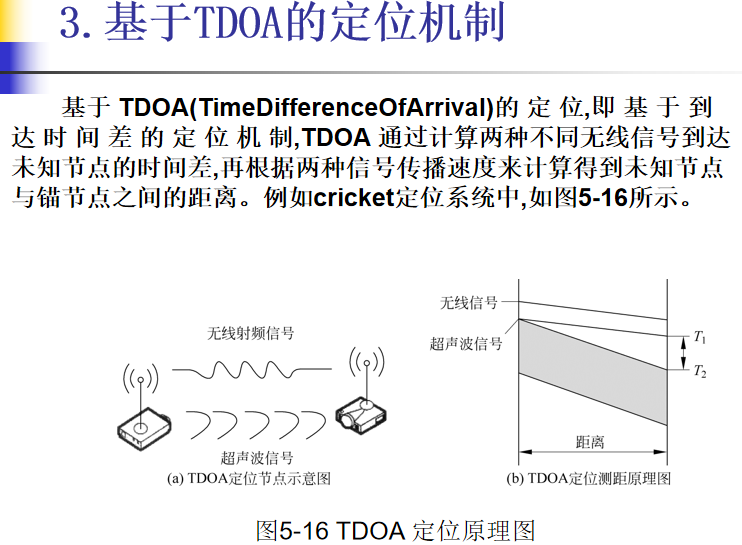
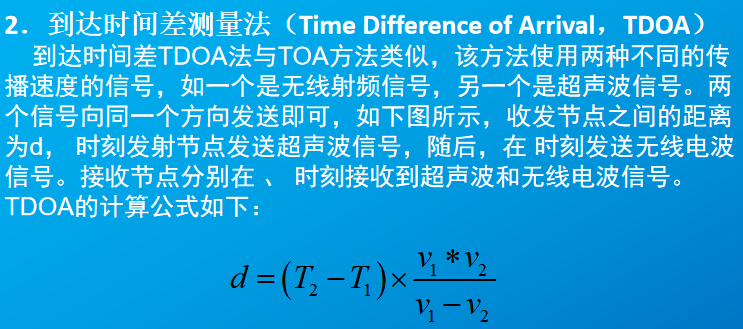
TDoA:(基于)到达时间差定位法
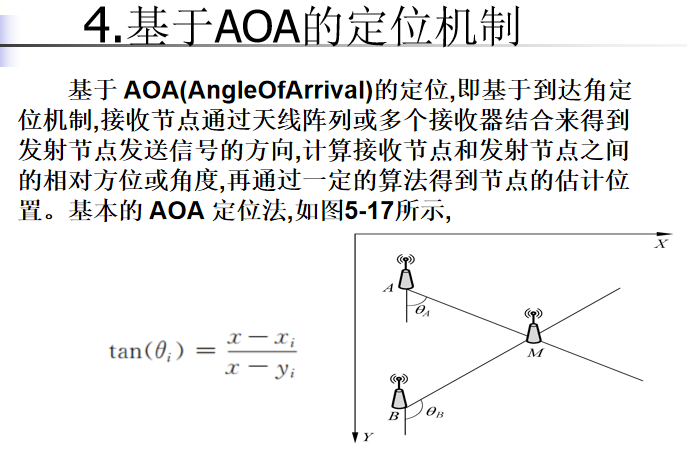
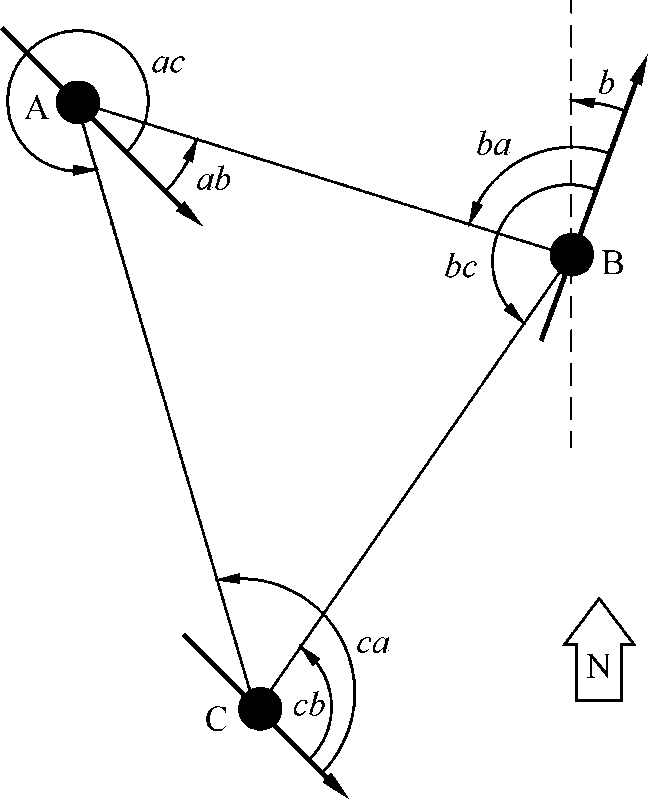
AOA:(基于)到达角
LoS:视线传输/同步丢失
TDMA:时分复用/时分多址
SNEP:传感器网络加密协议
MST:最小生成树
LMST:本地最小生成树
RNG:相关(相对)邻近图
DRNG:有向相关(相对)邻近图
ARQ:自动重传请求
AP:接入点
CSMA/CA:带有冲突避免的载波侦听多路访问
PCF:点协调功能
DCF:分布式协调功能
RTS/CTS:请求发送/允许发送协议
WPAN:无线个人网络
- 简答题:
- 简述无线传感器网络的定义及特点。
定义:无线传感器网络是大量的静止或移动的传感器以自组织和多跳的方式构成的无线网络
特点:自组织性、以数据为中心、应用相关性、动态性、网络规模大、可靠性、集成化、协作方式执行任务
- 简述无线传感器网络的关键技术包含哪些。
关键技术:拓扑控制、路由协议、时间同步、定位技术、数据融合、异构网络的互联互通、信息安全技术、大结构关联协同处理数据
- 简述无线传感器网络拓扑控制的定义及评价指标有哪些。
定义:拓扑控制(topology
control)是一种协调节点间各自传输范围的技术,用以构建具有某些期望的全局特性(如,连通性)的网络拓扑结构,同时减少节点的能耗或增加网络的传输能力
评价指标:连通性、覆盖性、吞吐量、扩展性、鲁棒性
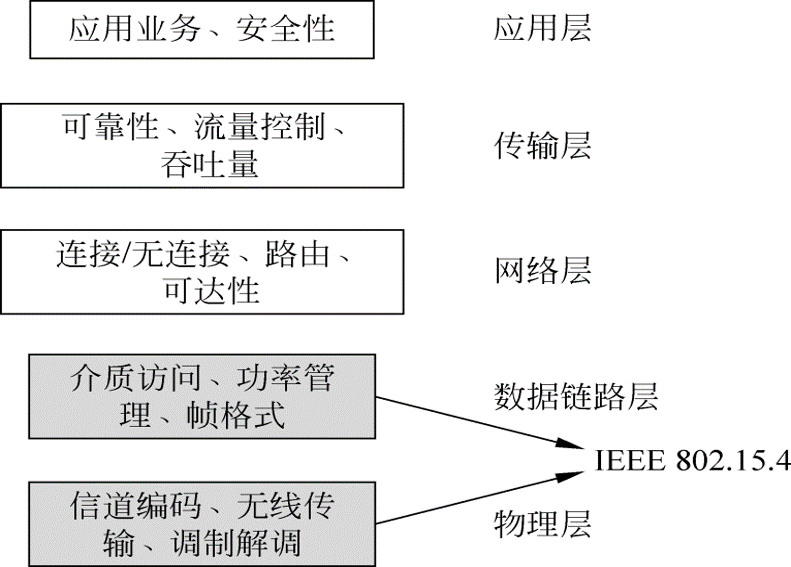
- 简述无线传感器网络协议结构及各层功能。
无线传感器网络协议由物理层、数据链路层、网络层、传输层和应用层组成
- 简述无线传感器网络安全需求有哪些。
数据保密性、数据认证、数据完整性、数据实时性、密钥管理、真实性、扩展性、可用性、自组织性、鲁棒性等
- 简述 S-MAC 协议工作方式以及优势与不足。
S-MAC 协议是在 802.11MAC
协议的基础上,针对于传感器网络的节省能量的需求而提出的传感器网络的 MAC 协议;
通常情况下传感器网络的数据传输量少,节点协作完成共同的任务,网络内部能够进行数据的处理和融合以减少数据通信量,网络能够容忍一定程度的通信延迟;
工作机制:周期性侦听和睡眠、流量自适应侦听机制、串音避免、消息传递。
优点:
(1)采用流量自适应侦听机制,减少了网络中的传输延迟。
(2)通过睡眠机制减少了空闲侦听的能量消耗,实现简单。
缺点:
(1)竞争窗口固定导致在网络流量较大情况下,会造成网络吞吐量较低而能耗和时延较高。
(2)当网络负载较低的时候,由于 SMAC
协议采用固定的周期性侦听/睡眠机制,节能效果并不理想.
- 简述 WSN 接入 Internet 的实现方式。
以太网、无线局域网、移动通信网、有线电视网、卫星、5G
应用层网关
延时容忍网络
TCP/IP 覆盖传感器网络协议栈
传感器网络协议栈覆盖 TCP/IP
移动代理
- 简述 WSN 路由协议的分类及分类标准有哪些(至少 3 种)。
1、按源节点获取路径的方法:主动路由协议、按需路由协议、混合路由协议。
2、按节点参与通信的方式:直接通信路由协议、平面路由协议、层次路由协议。
3、按路由的发现过程:以位置信息为中心的路由协议、以数据为中心的路由协议。
- 应用题:
- 画出无线传感器网络系统功能结构图,简单叙述各组成部分的功能及相关关系。
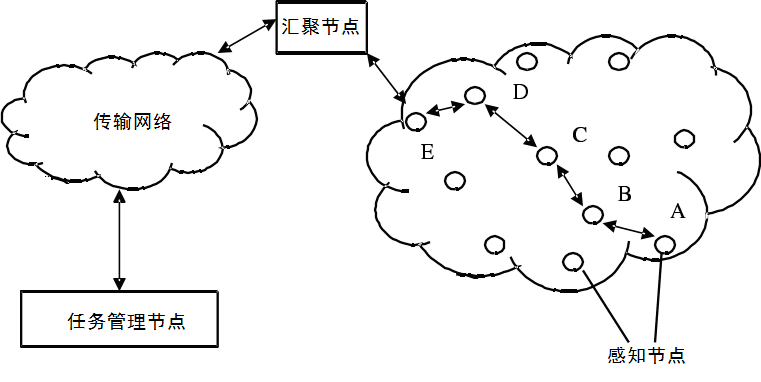
传感器网络包括传感器节点,汇聚节点和管理节点
传感器节点大量部署在在某一监测区域内,节点以自组织的形式构成无线网络,以协作的方式实时感知、采集和处理网络覆盖区域的信息,并通过多跳的方式经由汇聚节点链路将整个区域的信息传送到远程控制管理中心,且远程控制管理中心也可以对网络节点进行实时监控和操作
- 画出传感器网络的平面网络拓扑结构图(包含基站与普通节点),说明网络节点的工作方式,及优缺点。
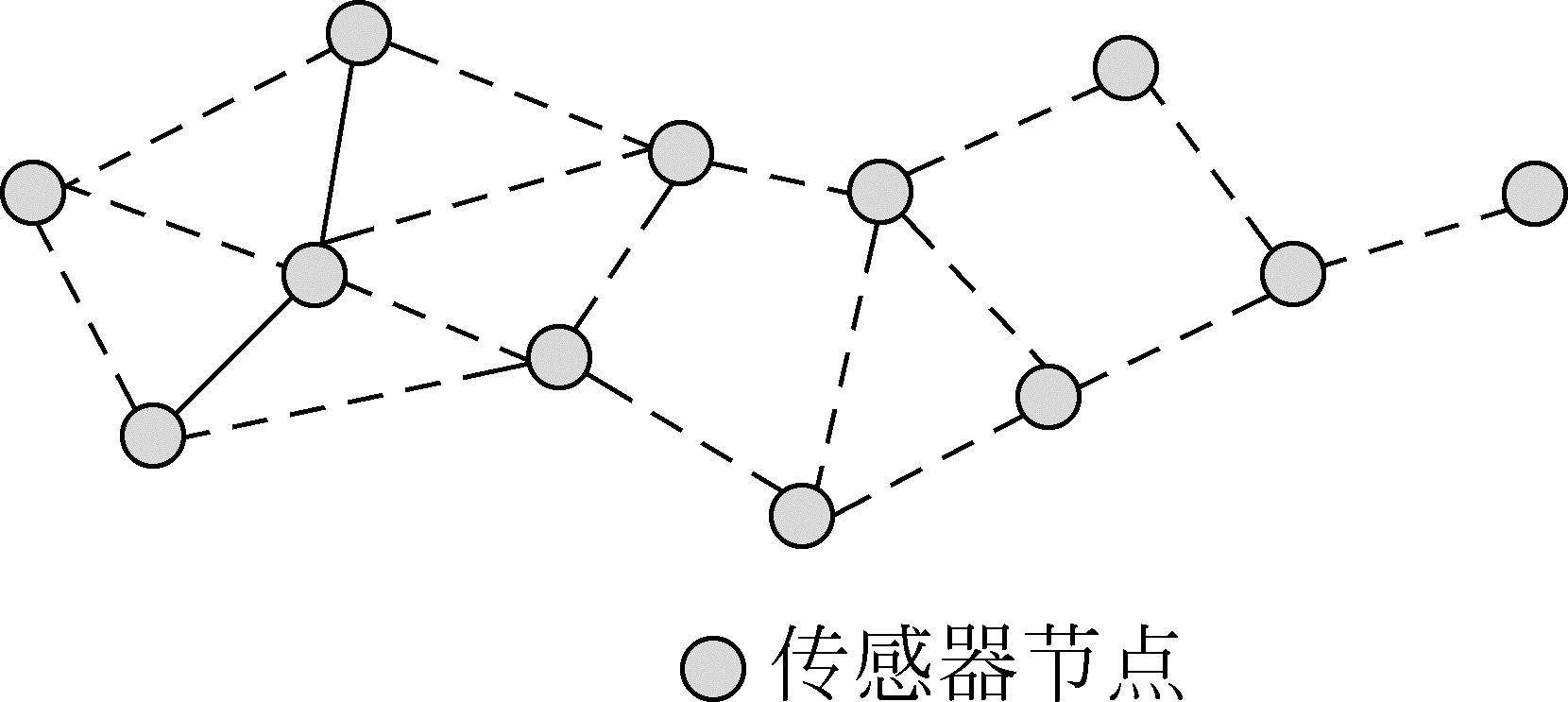
平面网络结构所有节点为对等结构,具有完全一·致的功能特性,也就是说每个节点均包含
相同的 MAC、路由、管理和安全等协议。是无线传感器网络中最简单的一种拓扑结构
优点:网络拓扑结构简单,易维护,具有较好的健壮性
缺点:没有中心管理节点,采用自组织协同算法形成网络,组网算法复杂
- 画出传感器网络的层次结构拓扑结构图(包含基站与普通节点),说明网络节点的工作方式,及优缺点。
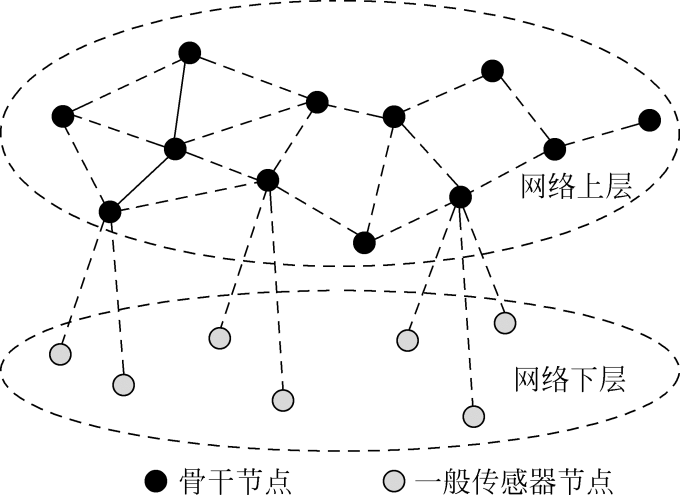
特点(工作方式):
(1)网络分为上层和下层两个部分,上层为中心骨干节点,下层为一般传感器节点
(2)通常网络可能存在一个或多个骨干节点
(3)所有骨干节点为对等结构
(4)分级网络通常以簇的形式存在
(5)网络拓扑结构扩展性好
优点:扩展性好,便于集中管理,可以降低系统建设成本,提高网络效率和可靠性
缺点:集中管理开销大,硬件成本高,一般节点不能直接通信
- 简述 LEACH 协议实现过程。
LEACH 是一种自适应分簇拓扑算法,它的执行是周期性的,每轮循环分为簇的建立
阶段和稳定的数据通信阶段。
簇的建立阶段:相邻节点动态地形成簇,随机产生簇头
数据通信阶段:簇内节点把数据发给簇头,簇头进行数据融合并把结果发给汇聚节点。
簇头耗能大,所以需要等概率选取簇头。使整个网络的能量负载达到均衡。
基本思想:网络周期地随机选择簇头,其它非簇头节点以就近原则加入相应簇头,形成虚
拟簇。簇内 节点将感知到的消息直接发送给簇头,由簇头转发给汇聚节点,簇头节点可
以将本簇内的 数据进行融合处理以减少网络传输的数据量
- 简述基于节点度的功率控制算法实现过程(或伪代码),以本地平均算法为例说明。
给定节点度的上限和下限,动态地调整节点发射功率,使节点的度数始终维持在度数的上限
和下限之间.LMA 算法利用局部信息来调整相邻节点的连通性,从而在保证网络连通的同时
使得节点间的链路具有一定的冗余性和扩展性。

- 简述无线传感器网络时间同步协议(TPSN)实现过程。
传感器网络的时间同步协议(TPSN)是另一种传统的使用树结构组织网络的“发射端-接收端”同步方式。TPSN
同步有两个过程:级别探测阶段(在网络部署时执行)和同步阶段。
(1)级别探测阶段
这个阶段的目标是创建网络的分层拓扑结构,每个节点被分配了一个级别,根节点(例如一个配备了
GPS,可以通向外部世界的网关)驻留在级别 0。根节点通过发出一个 level_discovery
消息开始这个过程,这个消息包含了级别信息和发射者独有的身份信息。
(2)同步阶段
在同步阶段,TPSN 沿着在前一阶段建立起的分层结构的边缘使用双向同步机制,也就是每个
i 级节点会与处于 i-1 级的节点进行时钟同步。
- 掌握基于 RSSI、TOA、TDOA、AOA 测距的理论基础及计算过程。

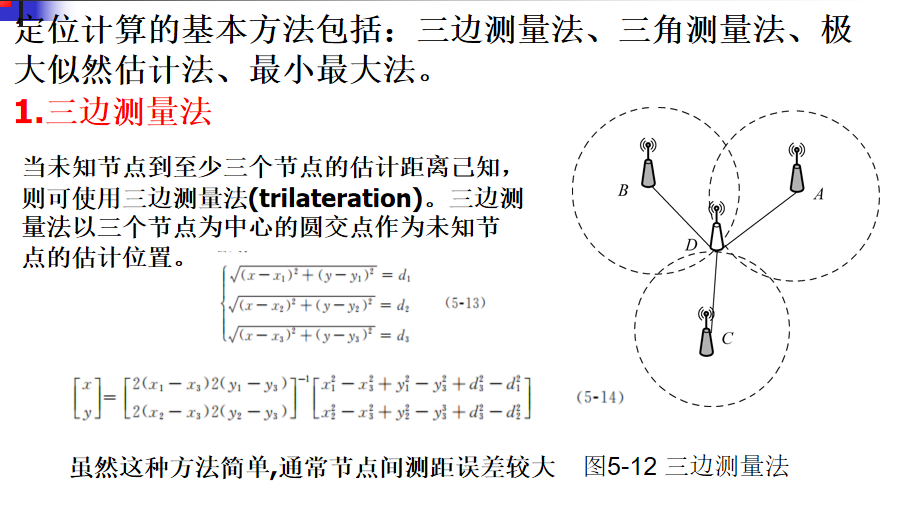
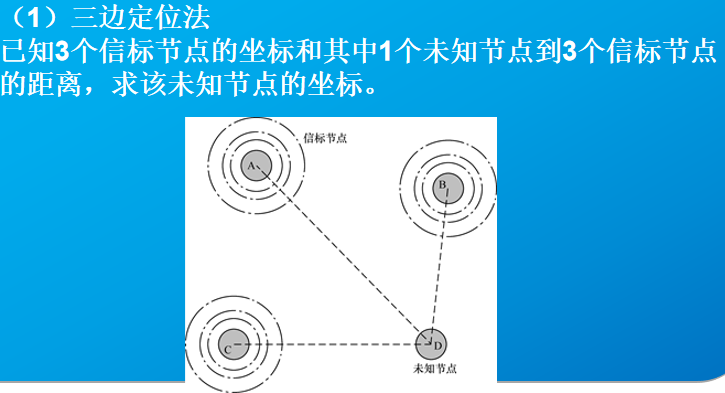
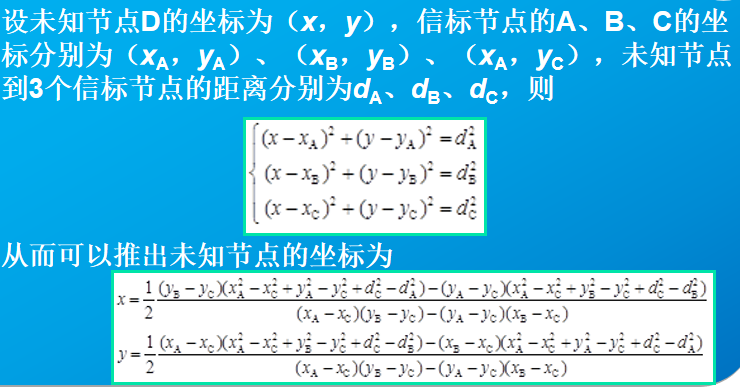
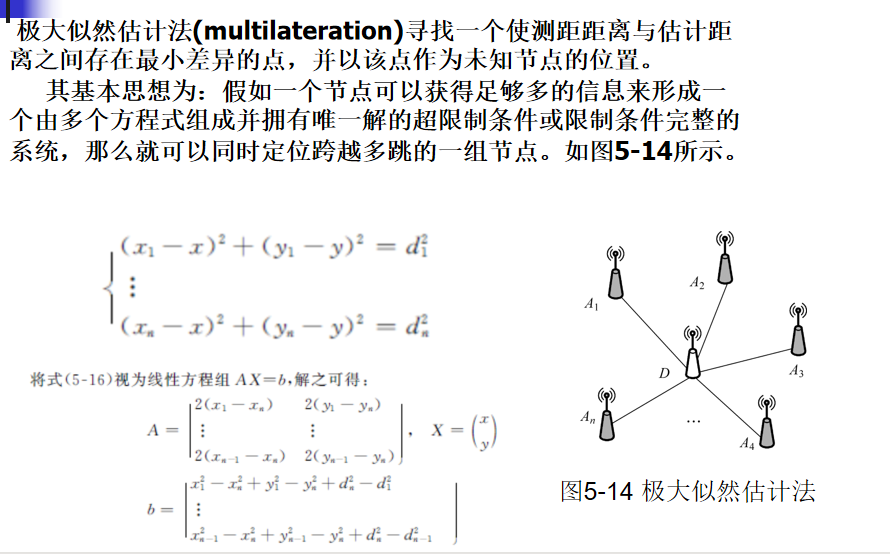
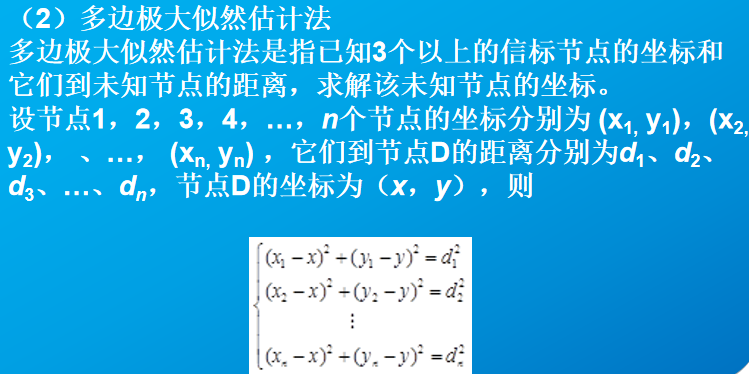
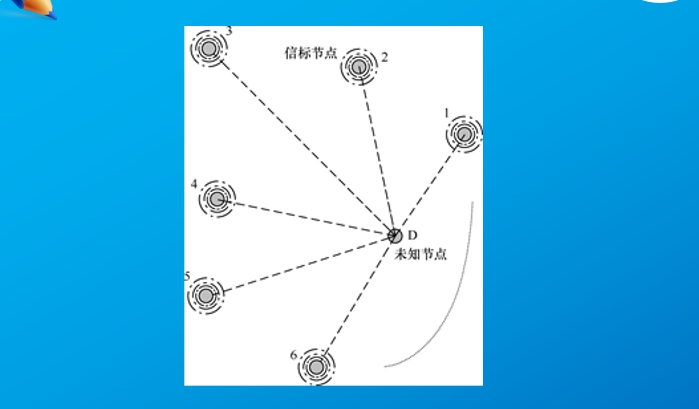
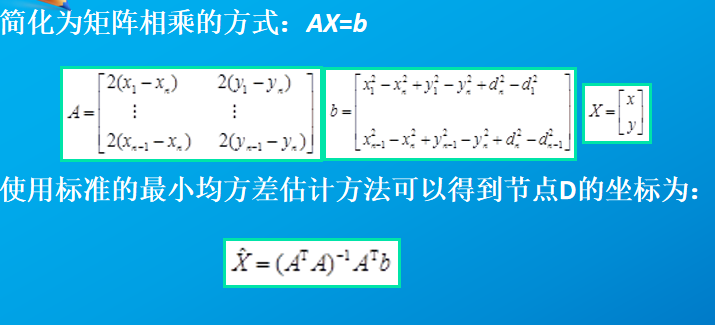
- 掌握三边定位法、极大似然定位法理论基础及计算过程。
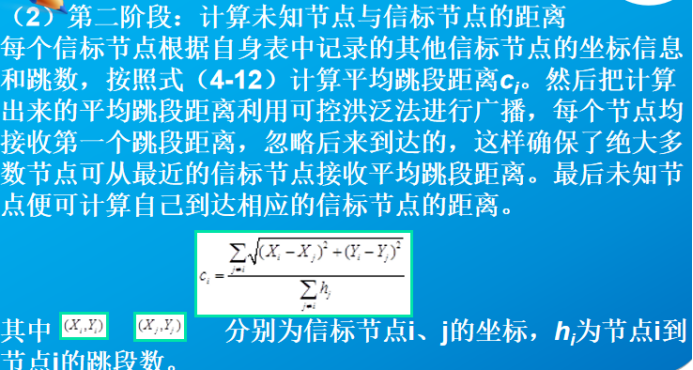
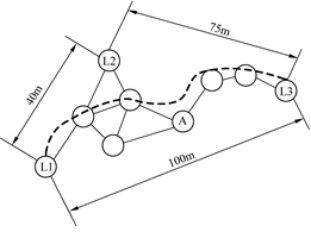
- **掌握 DV-Hop 定位实现过程。